
Motivation and Goals
Establishing a sustainable environment is an important mission for research on the next generation of intelligent houses. The current living environment is full of fixed architectural elements, or reactive elements that merely possess a “perception - reaction” function. These elements are hard to respond to a changing and complex environment by judging and assessing changing circumstances in order to satisfy users’ varied, complex needs. Take an opening in a classroom wall, for instance: When loud construction noise from outside can come in through the opening, but the classroom is extremely hot because of crowded students, would it be better to open or close the window in order to achieve a comfortable classroom environment? Of course this situation cannot be analyzed solely on the basis of use of a fixed glass soundproof door or window, or a ventilation opening, and can be resolved by a reactive device possessing solely a perception - actuation function only to a limited extend. As a consequence, this study seeks to promote the creation of an intelligent architecture environment possessing perception-computing-actuation-communication (PCAC) functions, where the computing mechanism can consider diverse situations, drive architectural elements, and engage in communication and coordination in order to adapt to changes.
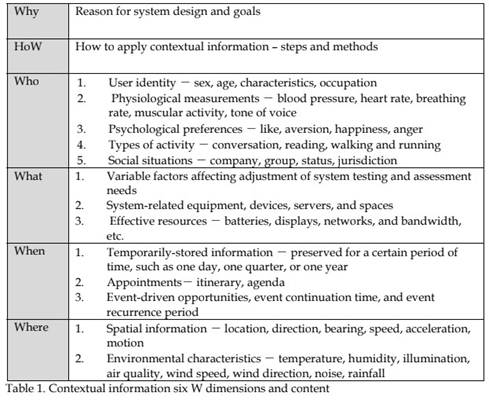
From the point of view of “context awareness,” adaptivity implies the possession of smart entities able to sense and respond to changes in external circumstances, adjust internal functions, and independently adopt actions meeting current needs. In addition, a building’s possession of adaptivity implies that, apart from making reasonable assumption, the smart entities will have enhanced ability to communicate and interact with users. Context implies situational information; system possessing context awareness can extract, interpret, and use contextual information, adjust its functions, and provide applications for users or to accomplish its mission (Selker, 2000; Dey, 2000). From the bottom up, all buildings contain numerous switches, and these switches – like brain cells – can be used to construct a logical system. From the top down, buildings and their environs contain contextual information concerning who, what, when, and where. How should we apply this information, and for what purposes should we use this information? In order to obtain and apply effective contextual information, a building must include an intelligent entity capable of processing information and inferring its meaning. Table 1 lists the dimensions and content of the “six W’s” for contextual information concerning building environments.
This study seeks to employ intelligent agent theory to investigate an adaptive architectural environment, takes smart skins as a research example, and proposes the use of neuro-fuzzy to establish judgment and reaction control conditions. Via a literature retrospective, issue research, case analysis, and summarization of conditions, this study derives adaptive environmental research categories, establishes adaptive building environment hypotheses based on intelligent agent theory, summarizes and analyzes the numerous feasible computational mechanisms and selection conditions, and employs a prototype smart skin structure to design experiments, perform testing and assessment, and analyze the relationship between users, the environment, and the smart skin.
Research Scope and Content
The smart skin hypothesis proposes that is a building envelope possesses intelligence, it should be able to simultaneously take the needs of both users and environment into consideration. Here environmental considerations include the life-related functions of the outdoor environment (sunlight, wind, noise, and rain, etc.) and indoor environment (temperature, humidity, and artificial lighting, etc.). User-related considerations include for the need for both physiological and psychological comfort (Fig. 1).
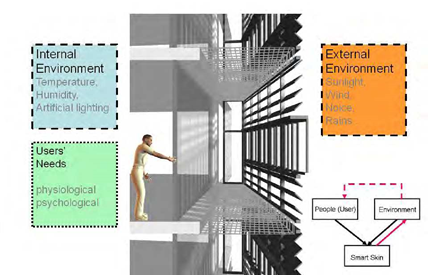
Fig. 1. Things to consider when designing a smart skin
This study employs intelligent agents as a framework for intelligently integrating people, objects, and spaces. These agents possess the function of context awareness, and fuzzy theory enables the agents to find optimal solutions among numerous possible computing mechanisms. From a macro perspective, the adaptive mechanism research categories derived in this study include smart house, agent theory, and context awareness (Fig. 2).
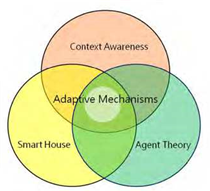
Fig. 2. Adaptive mechanism research categories
From a micro perspective, the core content of adaptive mechanisms is integrated on a platform of intelligent agent theory (this content includes context awareness, and interface and database design). Dimensions that must be taken into consideration include input perception conditions (including information concerning users and the environment), output action models (taking a smart skin as an example, these include the skin’s characteristics and changes in the composition of each level), and feasible computing mechanisms to perform processing and assessment (including rules and neural network and fuzzy theory; the computing mechanisms derive and select optimized adaptive effects and actions on the basis of input and output conditions). (Fig. 3)
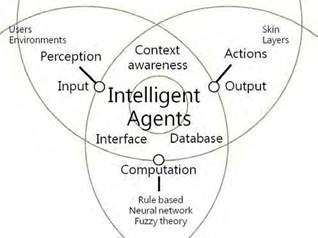
Fig. 3. Content of core research on adaptive mechanisms
Literature Retrospective
The smart house concept is derived from a series of transformations in dwelling technology. Due to the electrification of homes in the early 20th century, the availability of clean and convenient energy, and the use of household appliances and other applications, initiated a transformation in dwelling technology. At the end of the 20th century, the introduction of information and communications technology, and especially the Internet, into the household created a host of implications that are still being explored today. Intelligent agents are an important current research direction in the field of artificial intelligence. In an environment with distributed intelligence, computing, information, and communications mechanisms serve as tools for representing knowledge. Recent research on smart houses has incorporated sensing technology, computing technology, and information and communications technology in order to bring about self-programming ability better able to reflect users’ living habits (Mozer, 1998), and has attempted to achieve zone and dispersed control mechanisms on the basis of past central control models (Junestrand, 1999).
In an agent-based living environment, researchers, designers, have long been perplexed about how to select appropriate technologies, and are uncertain how to deal with these technologies. For example, the rule-based computing system employing binary logic used in the Sentient Building at TU Vienna (Mahdavi, 2005) employs a dispersed, hierarchical control node structure, where the nodes constitute information processing and decisionmaking control points. As a consequence, more meta-controllers must be added as the number of devices increases. The fact that it is not easy to distinguish modules elements in the system increases the difficulty of control and rule description. In another example, the Adaptive House (Mozer, 2005) employs a central neural control system termed the “Adaptive Control of Home Environment” (ACHE), to strike an optimal balance between maximum user comfort and minimum energy consumption. However, assessment of this system has found two main problems causing the neural system converge on a state of low energy consumption and low comfort: The first problem is that the system’s X-10 controller is often slow to respond or not working properly, and the second problem is improper user operation. As a result, the system tends to deteriorate, causing the central neural computing system to perform erroneous learning.
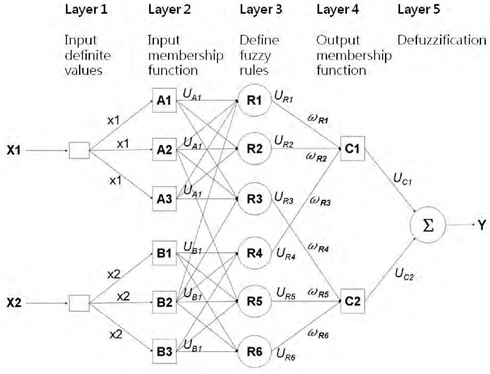
Fig. 4. A Neuro-Fuzzy System
After examining the foregoing cases, this study decided that the selection of an agent computing mechanism select must simultaneously take into consideration the three aspects of the situation, computing mechanism theory, and hardware and software technology. The study therefore proposes the use of a neuro-fuzzy concept combining fuzzy logic with a neural network as the agent computing mechanism. This approach pairs human logic with rational learning and adaptation ability. A neuro-fuzzy system employs fuzzy rules in the form of associated weights, which projects the neural network structure on a fuzzy logic system, causing the fuzzy logic system to possess the learning algorithm functions of a numeral network. Because of this, a neuro-fuzzy system is able to allow a smart skin to change or adjust its rules on the basis of sampled user experience-based information. In other words, a neuro-fuzzy system uses the steps of (1) fuzzification: input of clear values and a membership function, (2) definition of a fuzzy rule base, (3) fuzzy inference: output of the membership function, and (4) defuzzification to create a quasi-multilayer backpropagation neural network structure. Neuro-fuzzy learning relies on training by example to adjust the associated weights constituting the fuzzy rules. Fuzzy associative memories (FAMs) are fuzzy rules possessing associated weights. Altrock (1995) defines associated weights as degree of support (DoS), where degree of support expresses support for that fuzzy rule. The maximum value of degree of support is one. A neuro-fuzzy network employs an error back propagation algorithm, and adjusts degree of support to correct the error between the result obtained using the original fuzzy inference rules and the actual output value, and thereby achieve an optimal correspondence. Fig. 4 shows the neuro-fuzzy system, where ωR1-ωR6 are degree of support (DoS) values. (Negnevitsky, 2005)
Establishment of an Agent-based Smart Skin
A smart skin is defined as a building envelope that is able to perform adaptive intelligent activities by changing its skin and layers (including via reaction, action, interaction, and communication) following computing and inference based on perceived effective external information, and can thereby satisfy users’ needs for comfort and environmental sustainability. As far as perception factors are concerned, effective information is derived both from the environment – “the place” – and from the internal users. In addition, a smart skin also depends on hardware and software systems comprising sensors, computing equipment, and the building’s actuating elements to achieve perception – computing – actuation – communication context awareness functions. The main environmental factors and variables operated on by the driver agent-based intelligent objects are analyzed below:
Information from the environment and place can be classified as indoor and outdoor information. Outdoor information includes such items as light, noise, heat, air, moisture, and view. Indoor information includes illumination, temperature, humidity, security, and health. Effective user information includes psychological and physiological items; psychological information includes happiness, likes/dislikes, privacy, preferences, and respect; physiological information includes location, posture, age, sex, glucose, heart rate, and alone/with company. Adaptive actions of the outer shell can take the form of changes in the skin or in different layers.
Adaptive actions performed by the skin can be classified as performance changes and movement changes. Performance changes include changes in appearance, material, color, thickness, density, pattern, or mixing and matching. Movement changes include changes in opening method (such as changes in opening shape or size), translational motion, movement, rotation (angular change), and change of degree (such as change in transparency or density).
Adaptive actions performed by different layers can be classified as composition changes and layer changes. Composition changes include addition (variety and diversity), reduction (minimalist style), multiplication (repetition and differentiation), and divided (modules and elements). Layer changes include single-layer and multiple-layer changes, the relationship between the support and infill, the arrangement of skin layers (upper, middle, and lower or inner, middle, and outer), and the relationship between skin layers and the building mass (such as adhesion, incorporation, and separation).
In addition, with regard to hardware and software facilities, apart from consulting the content of a contextual knowledge base containing the foregoing perception and action information, the installation of sensors and actuators must also take into consideration the distribution, delineation, and density of sensor and actuator hardware, and their times of action, such as continuous actions times, intermittent action times, and action period settings (Fig. 5).
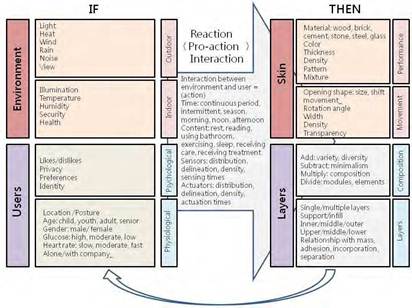
Fig. 5. Model of a smart skin framework with user-oriented context awareness functions
In short, the basic elements of a smart skin consist of sensors collecting external information, processors performing computing and inference, and actuators (architectural elements) outputting movements. A smart skin can change and adjust the state of the skin in accordance with changes in the external environment in order to maintain optimal user comfort and environmental sustainability.
Use of intelligent agent theory as an integration framework
An agent-based control system can be divided into two parts responsible for describing and setting the responses and actions of intelligent devices. The first of these consists of an independent intelligent agent module and its computing mechanism and plans, and the second consists of the intelligent agent community and its interaction model.
Software agents are able to perceive the environment and choose an action to implement to influence the environment (Russell, 2003). So-called perceiving is performed by sensors that receive information from the environment, and so-called actions refer to the agents’ ability to influence the environment. Agents must be able to react promptly, and must also work proactively to achieve their goals. The key to balancing action and reaction lies in the changing situation; specific situations can be referred to as events (Fig. 6).
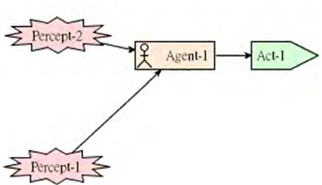
Fig. 6. An Intelligent Agent Module
Plans and sub-plans must be drafted to ensure that the system can effectively achieve its goals; these plans and sub-plans describe the cause and effect relationship between perceived events and output actions (Padgham, 2004). As a consequence, each agent’s basic module is composed of sensors, computing mechanisms, and actuators, including software and hardware (Russell, 2003). Software agents process information received from sensors or other agents via an event-driven model, and then drive the building’s in-filled components in accordance with plans or sub-plans, and perform reactive, proactive, and interactive adaptive behaviors. (Padgham, 2004). Reaction refers to immediate action taken by an agent without computing after receiving information. Proaction refers to action taken following computing after receiving information. Interaction refers to communication between an agent and other agents or a person via an interface (Fig. 7).
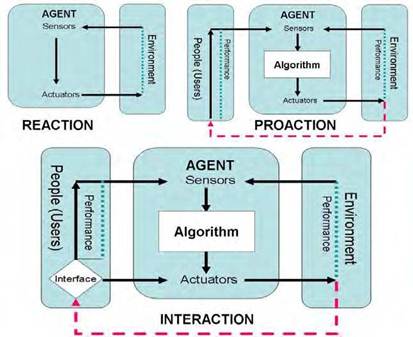
Fig. 7. Adaptive behaviour by intelligent agents
Agent communities can generate cooperative or coordinated interactive behaviors (including one-to-one, one-to-many, and many-to-many relationships) via common communications protocols, shared databases, messages, and messages transmitted by agent communities (Wooldridge, 2002). The levels and subordination relationships of agents within a community may change as they are reassembled to suit a goal or mission (Minsky, 1988) (Fig. 8).
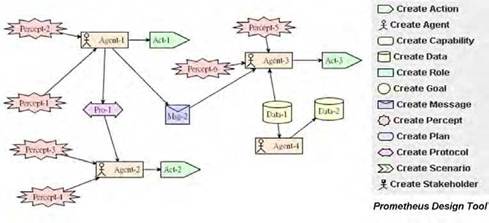
Fig. 8. Interactions in a community of intelligent agents
Existing technological conditions
An agent-based smart skin requires three main elements: sensors, a computing device, and actuators. A data logger (CR510, Campbell Scientific Canada Corp., 2007) is a feasible computing device; this data logger is a data acquisition center, and is able to receive data from most sensors and allow program design (Fig. 9). Using the data logger as the computing core of the smart skin, data processing proceeded as follows:
Input signal from sensor <-> data logger <-> network server <-> output to actuators
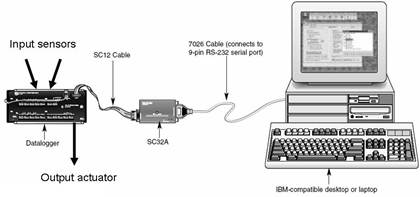
Fig. 9. CR510 data logger (Campbell Scientific)
The start of measurements and control of functions are based on time or event. The data logger is able to drive external devices, such as pumps, motors, alarms, freezers, and control valves. The data logger’s program software is known as EDLOG. EDLOG contains four processing elements: (1) input, (2) processing, (3) program control, and (4) output processing. We can therefore infer that the smart skin’s processing flowchart will be as shown in Fig. 10.
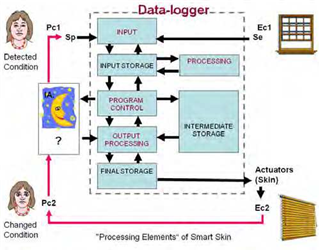
Fig. 10. EDLOG’s four processing elements and smart skin processing procedures
Fig. 11 shows an example of the EDLOG program’s plans. In addition, apart from the core program, because the system also required an agent interface design, executable files in the VB programming language were to activate interface agents. Database applications programs (Dreamweaver+ ASP+ Access) were used to design a user interface and establish a database. The establishment of a database involved the storage of user class data, and environmental change history and smart skin interaction records.
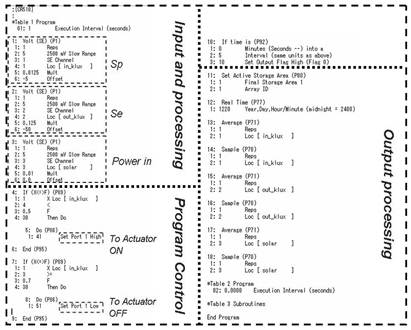
Fig. 11. Example EDLOG program
The smart skin modelled using the data logger verified the feasibility of developing an adaptive architectural environment on the basis of intelligent agent theory. In accordance with the foregoing analysis, the use of a binary logic rule-based computing mechanism possesses the following advantages, which make it easy for people to understand and allow it to reuse knowledge: (1) It can readily represent natural language knowledge; (2) it possesses an IF-THEN format structure; (3) it can easily extract knowledge from the problem solving process; and (4) it can employ “EQU”, “AND”, and “OR” statements to express agent-based adaptive behaviour. Nevertheless, rule-based computing mechanisms have the following major disadvantages, which prevent from being the main computing mechanism for agents: (1) The restrictions of rule-based logical conditions limit learning from experience. (2) While “AND” and “OR” binary logic can resolve conflicts where compromise is possible, they cannot resolve conflicting “XOR” situations; this necessitates the use of higher-level decision-making and control mechanisms, and prevent these mechanisms from being independent smart modules. (3) The binary logic lacks the ability to express multiple values and continuous values, which makes it difficult to resolve complex problems.
This study recommends that a neuro-fuzzy system be used as the computing mechanism for an intelligent agent module, and user-friendly fuzzy inference and neuro-fuzzy learning technology be used to establish an adaptive user experience-oriented building environment. In comparison with other adaptive technologies, neuro-fuzzy has the following advantages: (1) Because the system is constructed on the basis of fuzzy logic, learning freedom is controlled, and erroneous learning is avoided. (2) The system inherits knowledge from fuzzy logic systems, and can therefore interpret or make inferences from the results of learning. While smart skins with rule-based reasoning ability lack the adaptive ability needed to respond to complex, uncertain environments and multiple users (Chiu, 2005), pure neural network learning systems lack logical reasoning mechanisms. Fuzzy theory seeks to pair the advantages of both approaches, while avoiding their disadvantages.
Situation simulation
In order to verify the feasibility of applying a neuro-fuzzy approach, this study used the following planning processes as the basis for the design of a learning agent in a simulated situation: (1) Fuzzy logic inferences: When linguistic term descriptions are input, the rulebased fuzzy inference plan gives a degree of support (DoS) initial value (which is usually as 1 to indicate a highly supported rule). Fuzzy inference is then preliminarily used to output the action value (pre-adjustment). (2) User adjustment and records: Output action values are adjusted on the basis of users’ actual use (post-adjustment), and the result of adjusting the action of architectural elements is recorded and stored in a database. (3) Neuro-fuzzy training: The database provides examples for neuro-fuzzy network training. Computational learning adjusts the DoS, and training continues in a cyclic fashion until the error between use and the fuzzy logic and neuro-fuzzy system is minimized, at which point training ceases. Alternately, adjustment (post-learning) may stop after the degree of adjustment is less than a certain preset threshold value. (4) When the DoS have been adjusted, the fuzzy logic inference plan will be optimal, and the post-learning output value should be closer to the post-adjustment output value than to the pre-adjustment value (Fig. 12).
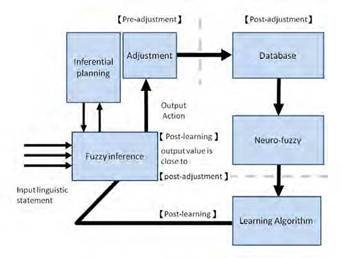
Fig. 12. Planning processes in a simulated situation
Situation simulation
The main task in this simulated situation was the adjustment of indoor lighting, which was performed by different agents. The Fuzzy-TECH software was used to simulate a smart skin’s fuzzy logic inferences and neuro-fuzzy learning. The unit modules in this experiment were simplified as two input terminals and one output terminal, and linguistic terms were simplified to three levels (e.g., low, mid, and high).
Setting user attributes and activity types
The agents output adaptive actions with different smart care levels, and the actions can be seen as response functions of user age and activity needs:
IF < user age, activity needs >THEN < action =F(user age, activity needs)>
The goal of setting user attributes and activity type is to test adaptive actions with different smart care levels. In accordance with observations of everyday life, the chief causes of differences in the actions of agents are: (1) User age. As age increases, the user’s vision gradually deteriorates, and the user needs more light to support activities (physiological need). (2) Lighting needs of different activities. Different lighting levels are needed for users’ different activities (environmental need). (3) Activity privacy needs. Different amounts of spatial privacy are needed to support different activities (psychological need).
The user attribute categories consisted of adults over 30 years of age and seniors under 70 years of age. The 30 users included equal numbers of men and women. In accordance with their user-oriented smart care level, the occupants were classified as normal, special disabled persons, and healthy seniors. The lighting needed for the users’ activities was classified as dim (for relaxation—resting, talking), medium (for general tasks—reading, writing), and bright (for precision tasks—sewing, nursing care). In addition, activity privacy needs were classified as low (e.g., talking), medium (e.g., reading, writing, sewing), and high (e.g., resting, nursing care).
Establishment of environmental situation and simulated process framework
This experiment used a window agent as example smart skin, and investigated the possibility of coordination and cooperation between a smart skin and other agents. The experiment was conducted in a 3.6 m x 3.6 m x 3.6 m indoor space. Light was obtained through a south-facing window; the solar altitude was fixed at 45°, and the sky brightness was set at 500 cd/m2 (Fig. 13). The windowsill height was 90 cm above the floor, and the window opening was 2.7 m x1.8 m (w, h). The temporary furniture arrangement consisted of a sofa, a reclining chair, a work table, and chairs, and was intended to facilitate various activities. (Fig. 14).
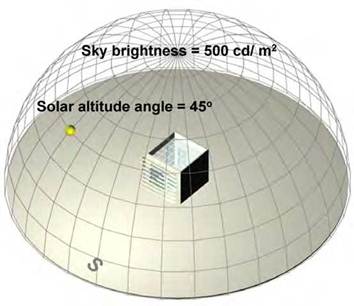
Fig. 13. Lighting environment settings
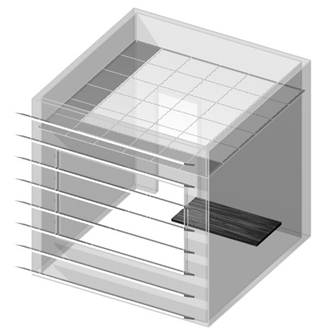
Fig. 14. Spatial settings
The window agent consisted of two subagent module elements: A louver board (LB) agent and a polymer-dispersed liquid crystal (PDLC) glass agent. PDLC glass contains minute liquid crystal droplets dispersed in a polymer grid. An optoelectronic effect allows the transparency of the glass to be changed. The LB agent adjusted the louver angle (down, zero, up) in accordance with indoor activity lighting needs (dim, mid, bright) and the user’s view needs (low, mid, high). The PDLC glass agent served to adjust the transparency of the PDLC glass in accordance with the indoor activity lighting needs (dim, mid, bright) and the user’s privacy needs (low, mid, high). Furthermore, the system interacted with another smart entity—a lamp agent. The system received information (including louver angle and PDLC glass transparency) from the window agent via wireless signals, and adjusted lamp brightness in order to improve indoor illumination (Fig. 15, Fig. 16).
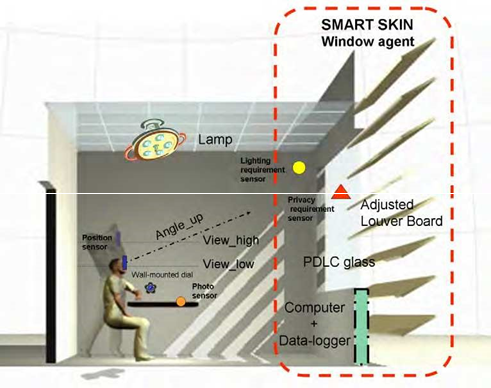
Fig. 15. Simulated situations
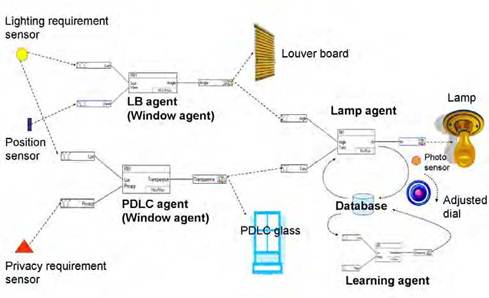
Fig. 16. Interaction and cooperation between agents
According to software simulations, although the missions of the different agents, and the goals and interests of the agent communities, were not necessarily identical, communication, compromise, and conflict involving the causal relationships between perceived events and events needs were handled by means of rational inference and arrangement depending on the fuzzy inference plan. The agents’ fuzzy inference plan: IF-THEN rule inferences and matrix rules. As can be seen from Table 2, a matrix rule represents the causal relationship between two perceived events and an output action. For instance, when the LB agent perceives that the light need is high (Lux_bright) and view need is low (View_low), it will adjust the louver angle to Angle_up in order to obtain more sunlight and a better view. When the PDLC agent perceives that the light need is high (Lux_bright) and privacy need is high (Privacy_high) it will reduce the transparency of the PDLC glass (Trans_low).
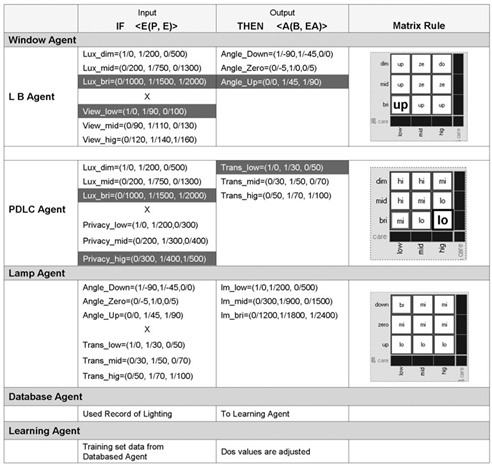
Table 2. Fuzzy inference plan
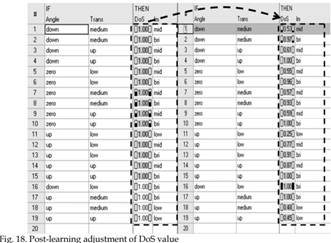
If the indoor brightness is adjusted on the basis of the lamp agent’s inferences, but the user is dissatisfied, it is also possible to adjust the lighting using a dial on the wall. As shown in Fig. 16, the simulated situation supports the foregoing agent interactions and users’ activities. Relying on a database containing records of lamp use, a learning agent can use neuro-fuzzy computing training data sets to adjust the DoS for the lamp agent’s fuzzy inferences, and thereby enhance the lamp agent’s ability to predict user behavior. The DoS indicates the user’s level of support for or satisfaction for the fuzzy rule in question. The pre-adjustment DoS value is set as 1 as an initial hypothesis. This expresses a high degree of expert support for that rule. The post-adjustment value is the revised value after use (Fig. 17), and expresses the difference between the expert rule and actual use. Fig. 18 records the lamp agent’s adjusted DoS values after learning.
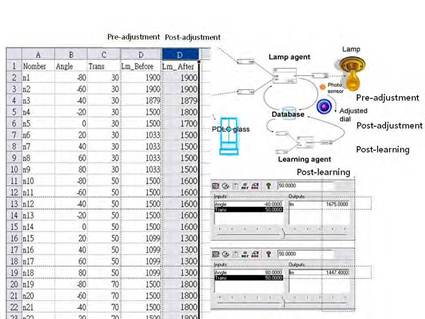
Fig. 17. Recorded pre-adjustment and post-adjustment input and output values; the postlearning values are shown on the right
Conclusions
An agent-based control system can be divided into two parts responsible for describing and setting the responses and actions of intelligent devices. The first of these consists of an independent intelligent agent module and its computing mechanism and plans, and the second consists of the intelligent agent community and its interaction model. Under fuzzy logic operating conditions, each intelligent agent is a clearly defined smart module, and agent communities can rely on cooperation and interaction to achieve their design missions. If a user experience-oriented context awareness function is taken as an agent design goal, fuzzy logic is superior to other inference mechanisms insofar as it can provide a near-human classification of feelings and sensations and inference method, and can also generate continuous mechanical output effects. In other words, such a system does not need to comply with the threshold value restrictions of rule-based reasoning, which cause actions to be discontinuous, nor do binary logic conflicts cause actions to be interrupted. Apart from possessing human or biological learning characteristics and transmitting experience derived from experts’ inferences, neuro-fuzzy learning avoids erroneous and defective learning. Situation simulation results displayed that the use of agents possessing only inferential computing ability in the establishment of a user experience-oriented context awareness function is insufficient. Instead, agents must possess learning ability, and be able to rely on constant learning to achieve familiarity with and acquire users’ life experience. The experiment confirmed that agents can rely on fuzzy logic inferences and neuro-fuzzy learning to use examples of user experience to adjust degree of support for fuzzy rules, and thereby eliminate the difference between expert rules and actual use.
Furthermore, in an environment containing many complex factors, independent agents cannot easily complete their missions in isolation. Instead, a community of agents must rely on coordination and cooperation to resolve the difficulties that it faces. The complexity of real environments often provides independent agents from using weighting alone to resolve problems. In particular, when agents’ actions cause conflicts, and a dilemma occurs, the coordination and cooperation of an agent community are needed to eliminate the problem. In an example earlier in this paper, when loud construction noise from outside can come in through an opening in a classroom wall, and the classroom is extremely hot because of crowded students, would it be better to open or close the window in order to achieve a comfortable classroom environment? As described above, the outdoor noise level can be classified as low, medium, or high, and the indoor temperature can be classified as low, medium, or high. Consequently, IF < room temperature high> THEN < window open>; IF < noise high> THEN < windows closed>. Nevertheless, IF < noise high and room temperature high> THEN < the window should be open or closed?>. At this time, a fuzzy rule can be employed to solve a problem with multi-value inputs and a binary output. Although, in theory, variables and rules can give agents a multi-value model, in the real world there are numerous binary actuators. As a result, even if inference using fuzzy rules can yield multi-value outputs, the restrictions on real actuators may cause fuzzy rule inference problems to revert to binary logic rule problems.
To resolve multi-value input, binary output decision-making problems, (1) transfer functions must be added after fuzzy rule inference. For instance, when an output value has a range of [0,1], the transfer function will be defined as: 0 (Off) when the value is ≦ 0.4,” XOR” for values between 0.4 and 0.6, where 0.5 is the highest “XOR” point, and 1 (On) when the value is ≥ 0.6. This allows multi-value output values derived by fuzzy rule inference to be converted to three kinds of situations, namely binary output values (On and Off) and “XOR”. (2) When “XOR” occurs, the signal must be transmitted to a coordination agent. In an agent community, coordination agents are not necessarily responsible for final decision-making. Instead, they can eliminate the causes of “XOR” states; when the causes are eliminated, decision-making becomes easier. For instance, when a coordination agent has to deal with two variables, such as sound and temperature, regardless of whether the window is opened or closed, or whether it should be partially opened following a weighting process, the agent will face a dilemma. The coordination agent must coordinate with other agents. For instance, if it decides to close the window to shut out outdoor noise, it must cooperate with the air conditioning agent, which must turn on the air conditioning to lower the indoor temperature. Alternatively, if it decides to open the window, it must cooperate with the campus activity management agent, which can re-schedule construction work to non-class hours, and thereby eliminate disturbance from construction noise.
In summary, agent theory emphasizes that intelligence is jointly created by many dispersed, simple independent agents. These agents can fulfill their common missions and goals reflecting complex factors through coordination and cooperation. The application of a neuro-fuzzy computing mechanism can enable agents to achieve cognitive learning and perform adaptive actions. As a consequence, a smart skin possesses a user experienceoriented context awareness function.


Comments are closed