
Introduction
This chapter is designed to introduce you to the various surveying techniques used to obtain the original field data on which such maps are based. An understanding of these surveying techniques not only provides us with some very useful field mapping tools but it also can give us further insight into the nature of topographic maps in general.
Geographers work with all scales of maps, from global to very local. Global maps – at least base maps – are readily available in published form. Maps of intermediate scale down to 1:20 000 also are available for many, although certainly not all, areas of Canada. But detailed topography at larger scales is rare and is not produced by government agencies as a matter of routine although they may be drawn for special projects such as highway and dam construction or for floodplain hazard mapping, for example. At these larger scales it usually is necessary to prepare an original map based on a photographic or field survey. If aerial photographs are unavailable or the topographic detail required is beyond their resolution, such maps must be based on a field survey.
This chapter is concerned with field survey techniques which will allow the production of detailed large-scale maps of moderate to high-level accuracy. Although some of these techniques are very simple and use readily available and inexpensive equipment, the resulting maps are quite adequate for many purposes in geography (or in geology, archaeology, or any other field science).
Principles of spatial location
The purpose of a field survey is to accurately locate points in the field so that their positions relative to each other can be plotted on a map. Regardless of the actual survey technique used, plotting positions of points in the field are determined by one or more of four basic positioning principles:
(a) location by three measured sides
(b) location by offset
(c) location by intersection
(d) location by resection
The application of these principles is illustrated in Figure 6.1 where A, B, and C are known positions, the bearing of AB is known, and X is some location to be determined and plotted on a map.
Location by three measured sides requires the field measurement of the distance from points A to X and from points B to X. These two distances are then plotted at the appropriate scale on the map as arcs centred on A and B respectively. The intersection of the arcs locates the position X; this positioning principle is the basis of ‘chain triangulation’.
Location by offset is based on the measured distance along a line offset from the base line A-B through the point X. If a compass is not available, the offset can be fixed as a normal to AB by repetitive measurements XY’ until the minimum distance XY is obtained. Once this minimum distance is determined, the angle AYX must be a right-angle and further measurement of the distance AY and AX by tape or pacing allows the offset to be plotted on the map.
If a compass is available the field surveyor simply proceeds along the base line AB a known distance until they are about opposite the point X at some point Y’. Noting the distance AY, the compass bearing of X from Y’, and the offset distance XY’, provides sufficient data to plot the position X on the map. This compass-based location by offset is commonly used in pace and compass traverses and in plane table surveys. Location by intersection involves positioning by the intersection of bearing lines to X from the known positions A and B. Clearly an instrument such as a prismatic compass must be available to use this principle of positioning. Location by intersection is frequently used in both pace and compass and plane table surveys.
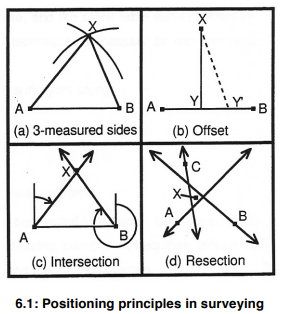
In a small area in which all the points to be mapped are visible from two points, the measurement of a single base line and the use of intersection will serve to locate all features. This technique is particularly useful for the location of inaccessible but visible features. Accuracy is maintained at a satisfactory level if the subtended angle AXB approaches 90o but it declines rapidly as it becomes more acute or obtuse. Location by resection can be employed if the positions of at least three landscape features are known. Compass bearings are taken from the plotting position (X) to each of these known positions (A,B and C) and the back bearings plotted on the map. The correct position of X is indicated by the intersection of the back bearing lines. If they do not meet exactly at one point (as they almost never do!) a small triangle of error will result. Conventionally, the point X is located in the centre of this triangle. If the triangle is large relative to the area being mapped then measurement error is unacceptable and the survey must be repeated.

